Precision Magnetic Rings & Encoder Disks for Off-Axis Absolute Encoders
Custom-engineered magnetic encoder disks and encoder rings for IC-Haus iC-MU series. Achieve ±0.05° accuracy with ultra-thin 1.0mm designs — ideal for robot joint modules, cobots, and humanoid robots.
- Perfect match for iC-MU, iC-MU150, iC-MU200 encoder chips
- Dual-track absolute magnetic ring — no homing required on startup
- Custom OD/ID, pole counts, and magnetization patterns available
- Sample lead time: 2 weeks | Mass production: 4 weeks
What Is a Magnetic Ring & Encoder Disk?
Understanding the core components of a magnetic off-axis absolute encoder — and how the magnetic encoder disk enables precise, battery-free position feedback in robot joints.
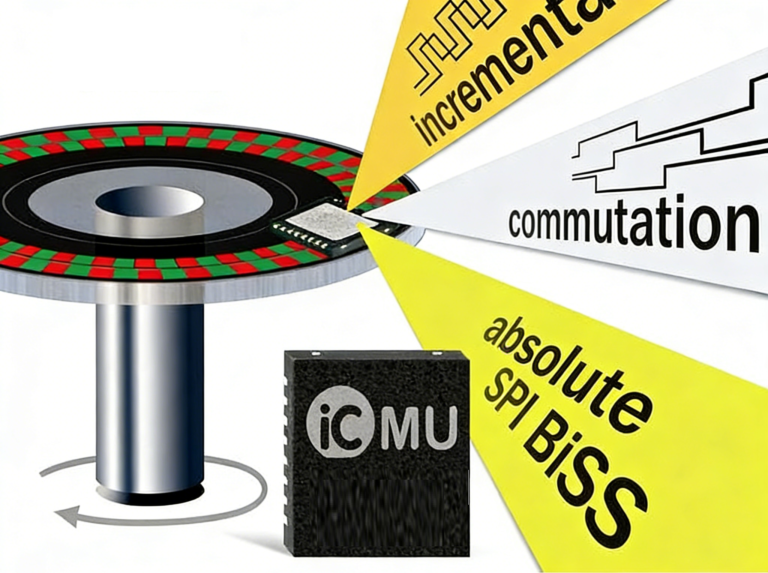
1. Anatomy of a Magnetic Off-Axis Absolute Encoder
A complete magnetic encoder system consists of three core elements working together:
Magnetic Target (Ring / Disk)
A precision-magnetized magnetic encoder disk or ring with alternating N/S poles arranged in one or two concentric tracks. This is the rotating element — mounted to the shaft — that carries the encoded magnetic pattern. OTV manufactures these encoder rings in bonded NdFeB with axial or radial magnetization.
Hall Sensor IC (Encoder Chip)
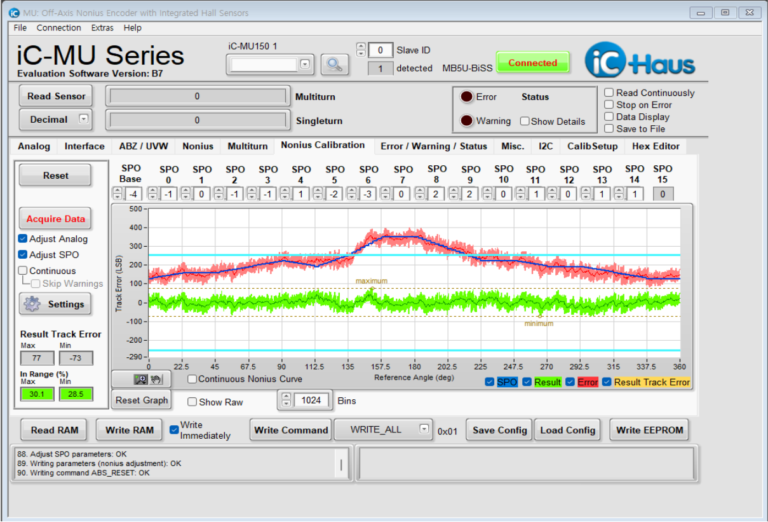
A stationary magnetic field sensor (such as the IC-Haus iC-MU series) positioned off-axis — to the side of the magnetic ring, not above the shaft center. It detects the pole pattern as the ring rotates and converts magnetic field variations into digital position data via Nonius/Vernier interpolation.
Signal Processing & Output
The encoder IC processes raw Hall signals into absolute angular position and outputs via BiSS, SSI, SPI (absolute), or ABZ/UVW (incremental/commutation). The entire system delivers true absolute position immediately on power-up — no battery, no homing, no optical components.
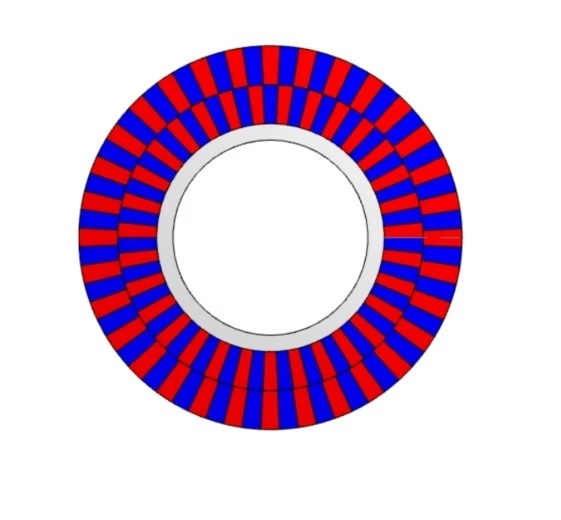
2. Magnetic Ring: Structure & Operating Principle
The magnetic ring (also called an encoder ring or magnetic encoder disk) is the heart of the feedback system. Here's how it's built and how it works:
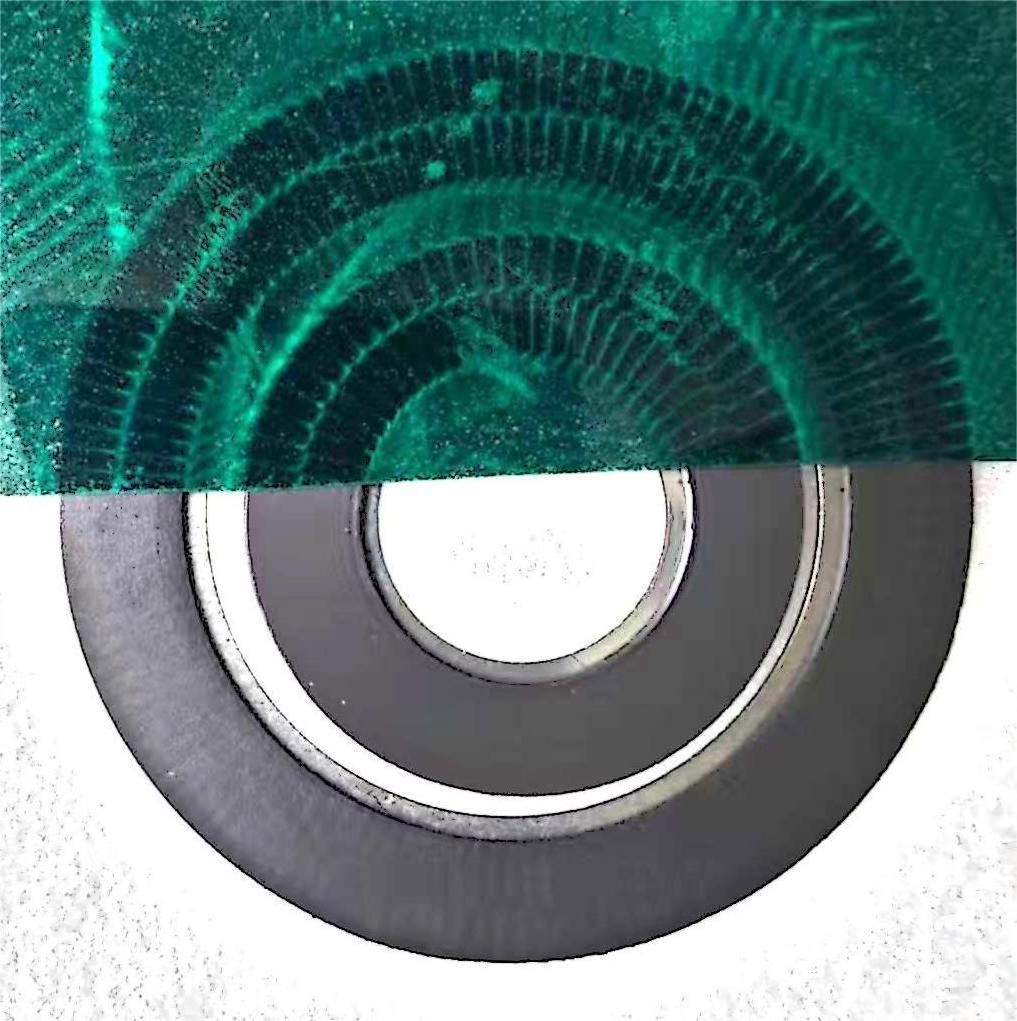
Dual-Track Encoding (Nonius/Vernier Principle)
Each encoder ring carries two concentric tracks — a Master track and a Nonius track — with different numbers of pole pairs (e.g., 32 vs. 31). The phase difference between the two tracks creates a unique pattern within one full revolution, enabling true absolute position readout instantly on startup.
Axial Magnetization
Poles are magnetized axially (perpendicular to the ring surface), allowing the Hall sensor to read the magnetic pattern from the side. This off-axis geometry is what creates the hollow center — essential for passing cables, shafts, or optics through the joint.
Bonded Construction
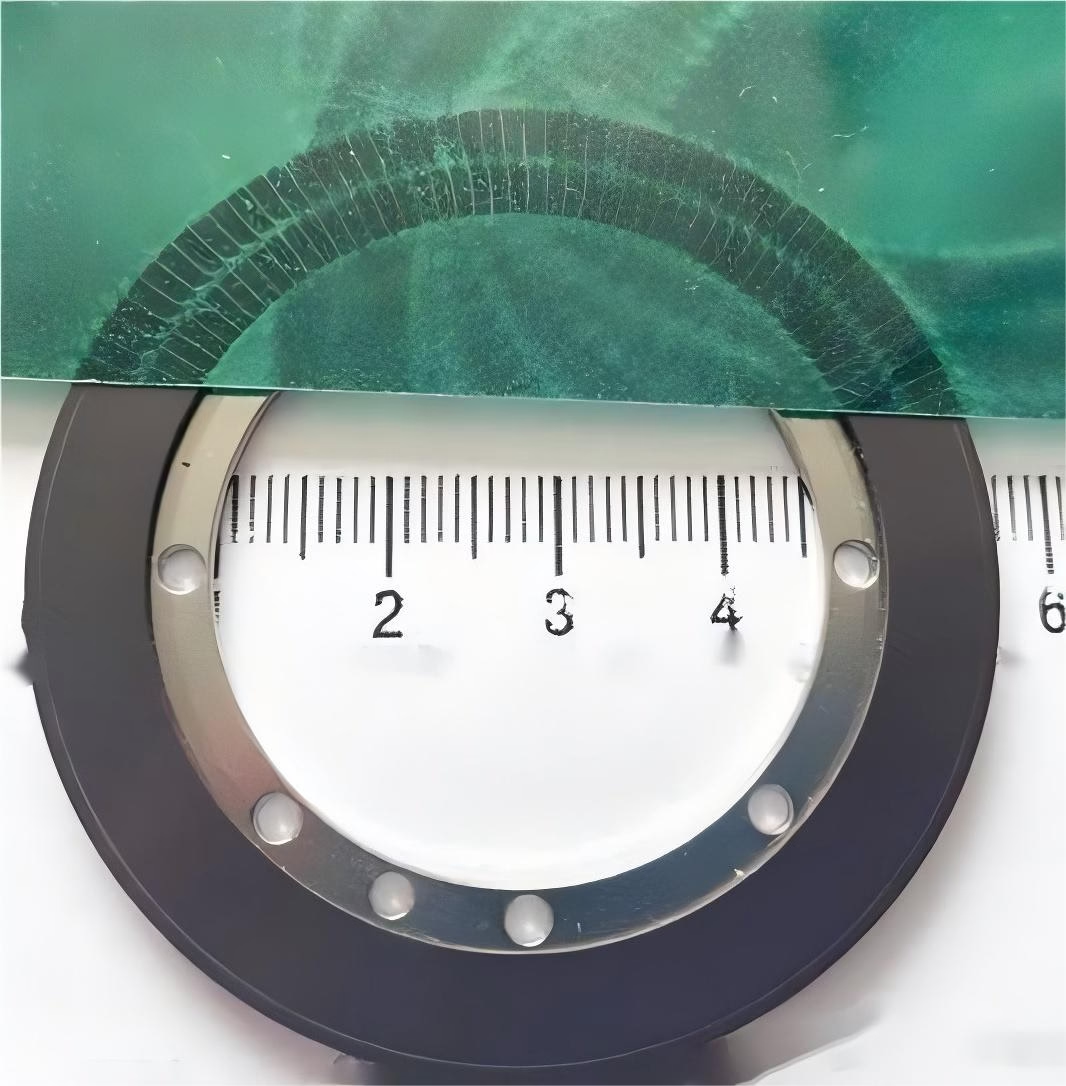
The magnetic material (bonded NdFeB or ferrite compound) is precision-molded and magnetized, then bonded to a metal backplate or hub. Thickness starts from 1.0mm, with standard pole widths of 1.28mm and 2.00mm matched to iC-MU encoder chips.
Hollow-Shaft Compatibility
Because the sensor IC sits to the side of the magnetic ring — not above the shaft center — the entire center bore remains clear. This is the key enabler for hollow-shaft robot joints where internal cable routing, fluid lines, or laser paths must pass through.
Why Robot Joint Modules Need Magnetic Encoder Rings
Four scenarios where an encoder ring is the only viable position feedback solution.

1. Hollow-Shaft Rotary Joints
Harmonic-drive joints need a hollow bore for cable pass-through. Only an off-axis magnetic encoder disk can deliver absolute feedback while keeping the center clear — the sensing chip sits beside the ring, not above the shaft.
2. Ultra-Compact Joints
As cobots and humanoids shrink, every millimeter counts. Our magnetic rings are as thin as 1.0mm, fitting into axial spaces that on-axis encoders simply cannot match.
3. Absolute Position on Startup
Multi-axis robots can't afford a homing sequence on every power-up. An absolute encoder ring delivers instant position data — critical for fast startups, safe emergency stops, and synchronized multi-joint motion.
4. High-Precision Servo Joints
Waist, shoulder, and wrist joints demand extreme accuracy. Our dual-track magnetic encoder disks achieve ±0.05° using advanced vernier principle encoding on matched multipole patterns.
Key Features of OTV Magnetic Encoder Rings
Engineered specifically as drop-in magnetic targets for leading encoder ICs.
True Absolute Measurement
Dual-track Nonius/Vernier encoding on every magnetic encoder disk — the sensor reads two tracks with different periods to derive a unique absolute position within one revolution. No battery, no homing.
Contamination-Proof
Unlike optical encoders, magnetic rings have no optical path to obstruct. Inherently immune to dust, oil, moisture, and condensation. Performs reliably in harsh industrial environments.
Non-Contact & Wear-Free
Magnetic sensing means zero mechanical contact between the encoder ring and the sensor IC. No wear, no maintenance, and a long operational lifespan — crucial for sealed robot joints.
Ultra-Thin Form Factor
Our magnetic encoder disks can be as thin as 1.0mm. The off-axis architecture enables flat designs that integrate into the tightest joint envelopes.
Flexible Output Interfaces
Full support for absolute serial protocols (BiSS, SSI, SPI) plus incremental ABZ signals and UVW commutation for brushless motor control — all from one magnetic ring target.
Perfect iC-MU Compatibility
Every OTV encoder ring is engineered with precise pole widths (1.28mm and 2.00mm standard) to match the IC-Haus MU family — iC-MU, iC-MU150, iC-MU200, and iC-MUE.
Magnetic Rings & Encoder Disks


Nonius Encoder Disc & Magnetic Ring Specifications
OTV manufactures both Axial and Radial Nonius encoder discs — dual-track absolute magnetic encoder disks engineered for IC-Haus iC-MU series chips. All models use Nonius/Vernier encoding for true absolute position output on startup. Inner and outer diameters, pole counts, and thickness listed below. Custom dimensions available on request.
Magnetic Material
Bonded NdFeB compound, precision-molded and magnetized. Ferrite available for cost-sensitive applications. Metal backplate: AL6061 or stainless steel. Rubber material: NBR.
Pole Width
Standard pole widths of 1.28mm and 2.00mm — precisely matched to IC-Haus iC-MU, iC-MU150, and iC-MU200 sensor IC specifications for optimal signal integrity and accuracy.
Performance & Lead Times
Remanence @20°C: 160 mT. Operating temp: -40°C to +140°C. Custom samples: 4 weeks. Mass production: 2 weeks after order confirmation.
AXIAL NONIUS ENCODER DISC
Flat disc design with poles magnetized axially (perpendicular to the disc surface). The Hall sensor reads the magnetic pattern from the face of the disc. Ideal for space-constrained hollow-shaft joints where the sensor sits beside the rotating disc. Reference prefix: A.
For iC-MU200 (1.28mm & 2.00mm Pole Width)
| Reference | Master (PP) | Nonius (PP) | ID (mm) | OD (mm) | Thk (mm) |
|---|---|---|---|---|---|
| A2001600 | 16 | 15 | 8 | 24 | 1.3 |
| A2003200 | 32 | 31 | 25 | 44.5 | 1.4 |
| A2003201 | 32 | 31 | 25 | 49 | 2.0 |
| A2003202 | 32 | 31 | 31.5 | 49 | 2.0 |
| A2003203 | 32 | 31 | 29 | 42 | 1.1 |
| A2003204 | 32 | 31 | 30.5 | 42.5 | 1.1 |
| A2003205 | 64 | 63 | 62 | 85 | 1.8 |
| A2006401 | 64 | 63 | 65 | 84 | 2.5 |
For iC-MU150 (1.28mm & 2.00mm Pole Width)
| Reference | Master (PP) | Nonius (PP) | ID (mm) | OD (mm) | Thk (mm) |
|---|---|---|---|---|---|
| A1501600 | 16 | 15 | 8 | 18 | 1.1 |
| A1503200 | 32 | 31 | 18 | 34.5 | 1.1 |
| A1503201 | 32 | 31 | 20 | 31.5 | 1.1 |
| A1503202 | 32 | 31 | 20 | 33 | 1.1 |
| A1503203 | 32 | 31 | 20 | 33 | 2.0 |
| A1503204 | 32 | 31 | 23 | 35 | 1.1 |
| A1503205 | 32 | 31 | 20 | 39 | 2.0 |
| A1506400 | 64 | 63 | 47.4 | 65.1 | 1.1 |
| A1506401 | 64 | 63 | 45 | 64 | 2.5 |
| A1506402 | 64 | 63 | 47.4 | 64.5 | 1.1 |
For iC-MU (1.28mm & 2.00mm Pole Width)
| Reference | Master (PP) | Nonius (PP) | ID (mm) | OD (mm) | Thk (mm) |
|---|---|---|---|---|---|
| A1283200 | 32 | 31 | 15 | 29 | 1.1 |
| A1283201 | 32 | 31 | 15 | 27.2 | 1.1 |
| A1283202 | 32 | 31 | 16.5 | 28.5 | 1.1 |
| A1286400 | 64 | 63 | 38 | 56 | 1.1 |
| A1286401 | 64 | 63 | 38 | 52 | 1.1 |
| A1286402 | 64 | 63 | 40 | 54.7 | 2.0 |
| A1286403 | 64 | 63 | 35 | 55 | 2.5 |
TYPICAL AXIAL STRUCTURE
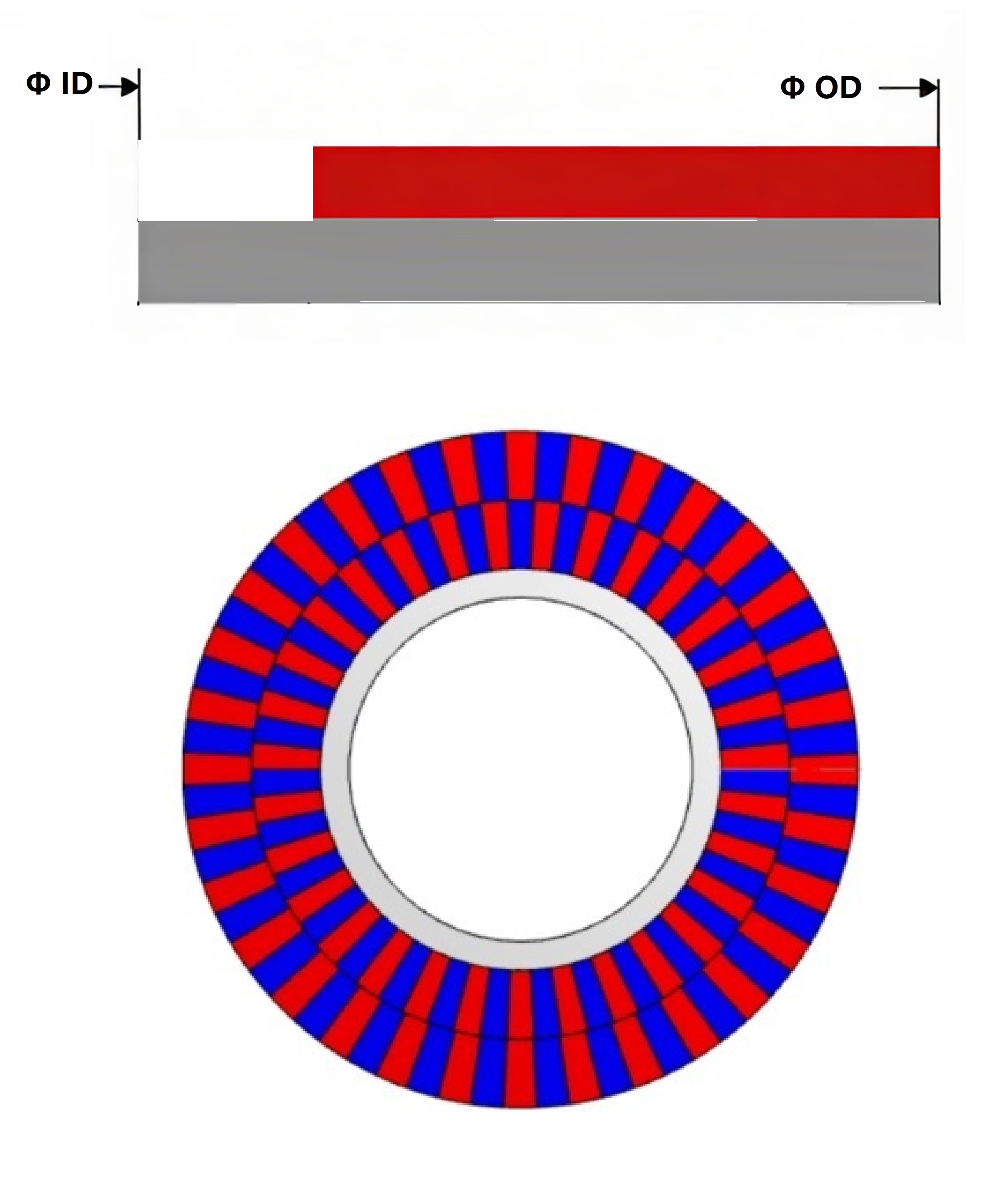
Axial encoder disc with dual concentric tracks. Poles are magnetized perpendicular to the disc face. The sensor IC is positioned beside the disc, reading the magnetic pattern from the side — enabling a hollow center bore.
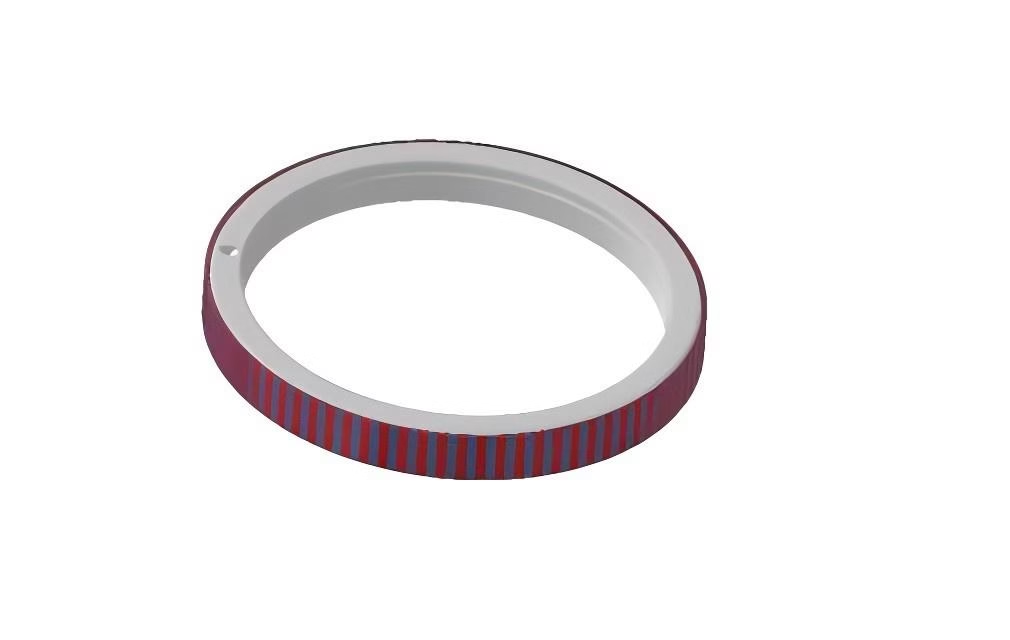
RADIAL NONIUS ENCODER DISC
Ring design with poles magnetized radially (on the outer circumference of the ring). The Hall sensor reads the magnetic pattern from the outer diameter edge. Ideal for applications where the sensor must be positioned radially around the ring's perimeter. Reference prefix: R. Pole width is measured in degrees rather than millimeters, reflecting the angular nature of radial magnetization.
For iC-MU (1.28mm Equivalent)
| Reference | Master (PP) | Nonius (PP) | ID (mm) | OD (mm) | Master PW (°) | Nonius PW (°) |
|---|---|---|---|---|---|---|
| R1286000 | 32 | 31 | 20 | 24.5 | 5.625 | 5.806 |
For iC-MU150 (1.28mm Equivalent)
| Reference | Master (PP) | Nonius (PP) | ID (mm) | OD (mm) | Master PW (°) | Nonius PW (°) |
|---|---|---|---|---|---|---|
| R1503000 | 64 | 63 | 53.1 | 59.6 | 2.813 | 2.857 |
Additional radial models and custom pole counts available on request. Contact our engineering team for your specific radial encoder requirements.
TYPICAL RADIAL STRUCTURE
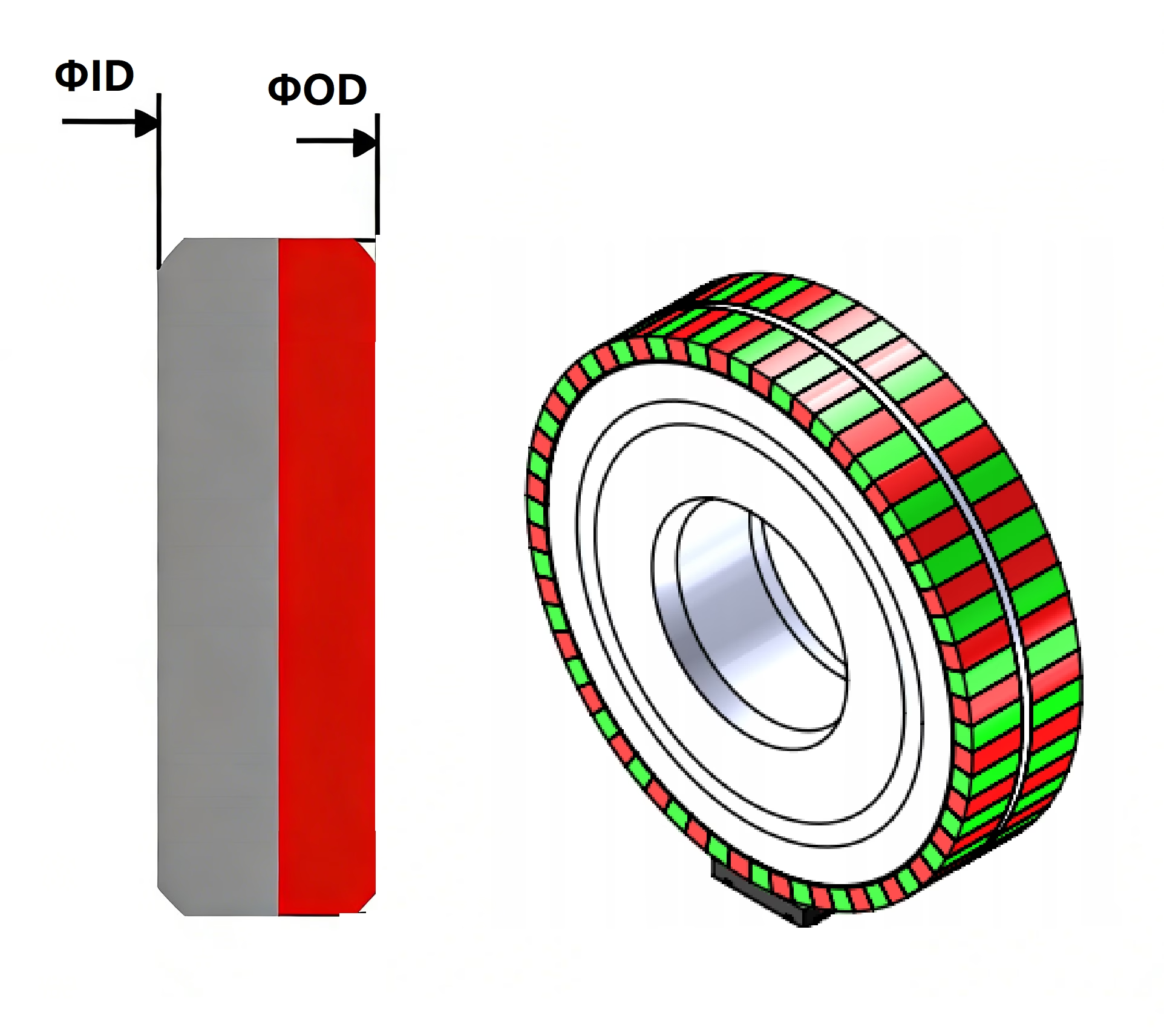
Radial encoder ring with poles magnetized on the outer circumference. The sensor reads the magnetic pattern radially from the perimeter — suitable for applications where axial space above the disc is unavailable.
Reference format: A = Axial | R = Radial • next 3 digits = chip series (200=iC-MU200, 150=iC-MU150, 128=iC-MU) • next 2 digits = master track pole pairs × 10 • last 2 digits = variant. Need a custom magnetic encoder disk not listed here? Contact us — full customization available.
Custom Magnetic Encoder Disk for a 7-Axis Cobot
The Challenge
A leading collaborative robot manufacturer was developing a new 7-axis arm requiring a compact joint module with a hollow bore for internal cabling. The feedback system needed ±0.1° accuracy or better, reliable operation from -20°C to +80°C, and a high-performance magnetic encoder disk solution that would fit within an extremely tight mechanical envelope.
The Solution
OTV engineers developed a fully custom, reduced-diameter magnetic ring. Rather than altering the critical pole width — which would degrade signal quality — we strategically reduced the total number of poles while keeping the pole width fixed at 1.28mm, the exact specification required by the iC-MU chip. This preserved optimal magnetic field geometry and signal integrity while shrinking the ring to fit the confined space. The result: a drop-in encoder ring solution delivering the high-resolution performance required for precise servo control.
Your Magnetic Ring, Built to Your Spec
OTV offers full customization — we are not just a supplier, we are your engineering partner.
Dimensions
Custom outer diameter, inner diameter, and thickness to fit your exact mechanical design. Need a magnetic encoder disk that fits a 18mm ID hollow shaft? We can do it.
Pole Count & Pattern
Choose your pole pair count — 16, 32, 64, or up to 128+. Single-track for incremental sensing or dual-track for absolute encoder rings with vernier encoding.
Mounting & Integration
Custom metal backplates, mounting hubs, adhesive backing, or press-fit designs — whatever your assembly requires. The magnetic ring arrives ready to install.
-1-png.avif)

Common Questions About Magnetic Rings & Encoder Disks
What is an off-axis absolute encoder with a magnetic ring?
It's a system where the encoder IC is positioned to the side of a magnetic ring (not above the shaft center), creating a hollow bore. By sensing the multi-pole magnetic pattern on the encoder ring, it provides a unique absolute position immediately upon power-up — no battery backup or homing sequence needed.
Which encoder chips do your magnetic rings work with?
Our magnetic encoder disks and rings are specifically engineered for the IC-Haus MU family: iC-MU, iC-MU150, iC-MU200, and iC-MUE. Standard products feature correct pole widths (1.28mm and 2.00mm). We can also customize encoder rings for other Hall-sensor-based encoder chips.
Can I get a custom magnetic encoder disk sample?
Yes. We provide custom-designed magnetic ring samples for validation. Samples are typically charged at a nominal fee to cover material and setup costs. Lead time for sample building is generally 4 weeks after design confirmation.
What is the minimum order quantity?
We are flexible and happy to discuss volume-based adjustments for prototype or trial orders. Contact us with your requirements for a tailored quotation.
How long does mass production take?
For standard magnetic encoder disks and rings: 2 weeks after order confirmation and receipt of deposit (when no stock is available). Custom designs may vary — we'll confirm lead times during the quoting process.
What customization options are available for encoder rings?
We fully support customization of inner/outer diameter, mounting hole positions, thickness, pole count, magnetization direction (radial/axial), track design, and magnetic properties to meet your specific application needs.
Ready to Spec Your Magnetic Encoder Ring?
Tell us your chip choice, mechanical constraints, and accuracy goals. Our engineering team will recommend the optimal magnetic encoder disk for your application — and deliver a custom sample in as fast as 4 weeks.
Related Products & Resources
Explore OTV's full range of precision encoder solutions for industrial automation, robotics, and motion control.
⚙ Magnetic Encoders
- Custom Magnetic Encoder Ring Manufacturer
- Off-Axis & Hollow-Shaft Magnetic Encoders
- Custom Magnetic Encoder Rings
- Encoder Magnet Target
- Magnetic Target for IC-Haus iC-MU200
- Hard Ferrite Magnetic Ring
- Magnetic Ring with Reference Mark
- Encoder Magnetic Rings for Robot Joints
- Direct Replacements for RLS Encoder Rings
⚡ Inductive Encoders
- High-Precision Absolute Inductive Encoders
- Absolute Inductive Encoder | OTV-INE Series
- Inductive Linear Encoder | OTV-IL Series