Encoder Ring for Humanoid Robot: Precision Feedback for Robot Joints
From the Beijing Humanoid Robot Half Marathon, where over 300 robots competed in autonomous navigation on an open urban course, to Tesla’s open‑sourcing of Optimus dexterous hand hardware, the humanoid robotics industry is accelerating faster than ever.
Based on the rapid iteration of today’s robotics technology, modern humanoid and quadruped robots are capable of an astonishing range of tasks. They can sprint across uneven terrain, leap over obstacles, throw punches, execute backflips, dance in sync with music, provide emotional companionship, and even sort packages in busy warehouses. These capabilities are not just showpieces—they are proof of how far actuation, sensing, and control algorithms have come.




In a typical humanoid robot, there will be 30‑40 joints and all of them require a precise, reliable joint sensing.
Each joint must know its position and speed instantly after power‑up, operate within ultra‑compact hollow‑shaft envelopes, and withstand shock, vibration, and harsh environments.
Why Choose Magnetic Encoders for Robot Joints?
Magnetic encoders stand out primarily because of two key advantages: compact construction and environmental robustness.
 Complementary Physical Strengths – Thrive in Harsh Environments
Complementary Physical Strengths – Thrive in Harsh Environments
Traditional optical encoders, while highly accurate, rely on transparent disks and are very sensitive to contamination. Dust, oil, or moisture can degrade or even disable them. Magnetic encoders work by sensing magnetic fields rather than light – they are inherently resistant to dust, oil, moisture, and vibration. This makes them ideal for industrial, outdoor, and other challenging environments.- Filling the Physical Gap – Ideal for Compact Joints
A major advantage of magnetic encoders is their simple, small form factor. They can easily be designed with a hollow shaft, perfectly matching the need for compact, seamless integration in robotic joints. With advanced AMR/TMR technology, modern magnetic encoders combine high accuracy with small size. Their non‑contact, wear‑free operation also enables maintenance‑free, long‑life performance.
 Complementary Physical Strengths – Thrive in Harsh Environments
Complementary Physical Strengths – Thrive in Harsh Environments Filling the Physical Gap – Ideal for Compact Joints
Filling the Physical Gap – Ideal for Compact JointsThere is no “perfect” technology – only the right choice for a given application.
What Makes an Encoder Ring Right for Humanoid Robots?
The precision‑magnetized encoder ring – the component that translates mechanical rotation into a clean magnetic signal for the sensor chip.
As humanoid robots move from the track and the lab into mass production, OEMs and system integrators are facing a growing demand for encoder rings that can deliver:
Accuracy to enable precise locomotion, balance and manipulation
Resolution to support smooth torque control and coordinated multi-joint motion
Compact size to fit within tight joint envelopes
Durability to withstand real-world shock, vibration and environmental stress
A typical humanoid robot integrates 30 to 40 joint modules, and each joint requires at least one high-performance encoder ring. Unlike industrial automation applications where sensor placement is often flexible, humanoid joints present several unique constraints:
Hollow-shaft architecture: Cables for power, data and cooling often pass through the center of the joint. A conventional on-axis encoder would block that path, whereas an off-axis encoder ring leaves the center unobstructed while sensing from the side.
Limited axial space: High‑power‑density joints need ultra‑thin components—often 1.0 mm or thinner.
Accurate absolute positioning: The robot must know its exact posture the instant power is applied—no time‑costly homing sequences allowed.
High dynamic response: Fast start‑stop, torque reversal and walking gaits demand low latency (< 10 µs) and high update rates.
Rugged reliability: Dust, impact and vibration are unavoidable in real‑world operation.
How the Magnetic Encoder Ring Works
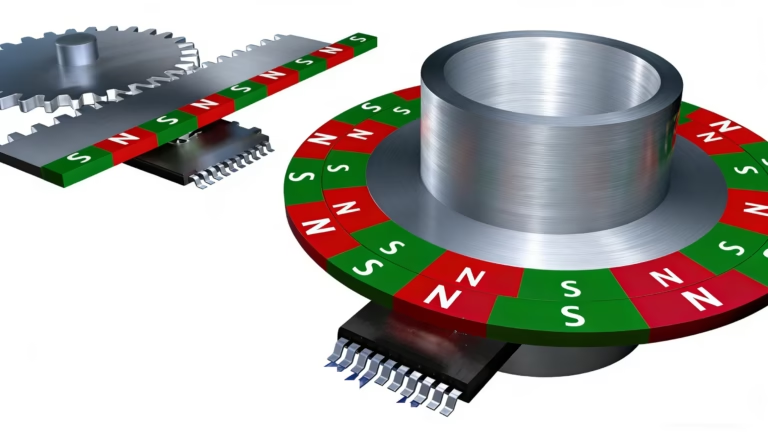
A magnetic absolute encoder system for a humanoid joint comprises three main parts:
Encoder ring: A precision‑formed ring, typically made of bonded ferrite rubber (optionally on a stainless steel carrier), that rotates with the joint shaft. The ring is magnetized with alternating north and south poles arranged circumferentially.
Sensor chip: A Hall, AMR or TMR sensor IC (such as the iC‑MU series from IC‑Haus) positioned off‑axis, reading the magnetic field emitted by the poles.
Processing electronics: The ASIC converts magnetic flux variation into a digital position value using arc‑tangent interpolation and, for absolute systems, a Nonius (vernier) algorithm.

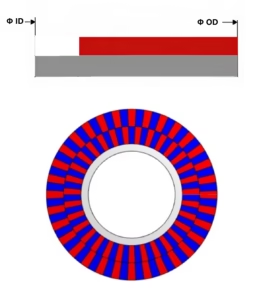
For absolute measurement, the encoder ring often features two concentric tracks (dual‑track design).
The master track carries high‑frequency pole pairs for fine‑grained interpolation; the absolute or Nonius track has a slightly different pole count. The magnetic chip simultaneously reads both tracks, calculates their phase difference, and instantly determines the absolute angular position—error‑free at any point in the rotation.
This Nonius principle enables true single‑turn absolute encoding without battery backup or homing.
For absolute measurement, the encoder ring often features two concentric tracks (dual‑track design). The master track carries high‑frequency pole pairs for fine‑grained interpolation; the absolute or Nonius track has a slightly different pole count. The magnetic chip simultaneously reads both tracks, calculates their phase difference, and instantly determines the absolute angular position—error‑free at any point in the rotation. This Nonius principle enables true single‑turn absolute encoding without battery backup or homing.
OTV Sensing: Standard and Custom Encoder Rings for Humanoid Robots
Standard Product Portfolio
We supply rings fully optimized for the most widely used absolute encoder chips, including the IC‑Haus iC‑MU series:
iC‑MU / iC‑MU (required pole pitch: 1.28 mm)
iC‑MU / iC‑MU150 (required pole pitch: 1.5 mm)
iC‑MU / iC‑MU200 (required pole pitch: 2.0 mm)
| AXIAL NONIUS ENCODER DISC | ||||||||
| IC MU200 | ||||||||
| Reference | Number of pole pairs on master track | Number of pole pairs on Nonius track | ID | OD | Diameter of master track | Diameter of Nonius track | Pole width of master track | Pole width of Nonius track |
| A2003200 | 32 | 31 | 25mm | 44.5mm | 40.8mm | 32.8mm | 2mm | 1.66mm |
| A2006400 | 64 | 63 | 62mm | 85mm | 81.5mm | 73.5mm | 2mm | 1.83mm |
| IC MU150 | ||||||||
| Reference | Number of pole pairs on master track | Number of pole pairs on Nonius track | ID | OD | Diameter of master track | Diameter of Nonius track | Pole width of master track | Pole width of Nonius track |
| A1503200 | 32 | 31 | 18 | 34.5 | 30.6 | 23.4 | 1.5 | 1.34 |
| A1506400 | 64 | 63 | 47,40 | 65,10 | 61.1 | 53.9 | 1.5 | 1.34 |
| IC MU | ||||||||
| Reference | Number of pole pairs on master track | Number of pole pairs on Nonius track | ID | OD | Diameter of master track | Diameter of Nonius track | Pole width of master track | Pole width of Nonius track |
| A1286400 | 64 | 63 | 38 | 56 | 52.2 | 45 | 1.28 | 1.12 |
| A1283200 | 32 | 31 | 15 | 29 | 26 | 18.88 | 1.28 | 1.12 |
| Radial NONIUS ENCODER DISC | ||||||||
| IC MU | ||||||||
| Reference | Number of pole pairs on master track | Number of pole pairs on Nonius track | ID | OD | Diameter of master track | Diameter of Nonius track | Pole width of master track/° | Pole width of Nonius track/° |
| R1286000 | 32 | 31 | 20 | 24.5 | 4.8 | 1.2 | 5.63 | 5.81 |
| IC MU150 | ||||||||
| Reference | Number of pole pairs on master track | Number of pole pairs on Nonius track | ID | OD | Diameter of master track | Diameter of Nonius track | Pole width of master track/° | Pole width of Nonius track/° |
| R1503000 | 64 | 63 | 53.1 | 59.6 | 5.8 | 2.2 | 2.81 | 2.86 |
Full Customization Services

OTV Sensing provides full customization:
Dimensions: OD, ID, and thickness to match your mechanical enviroment. For ultra‑tight joints, we can produce rings as thin as 1.0 mm.
Pole count: From 16 to 128 pole pairs, or even custom numbers for specific Nonius ratios.
Magnetic pattern: Dual‑track (absolute + incremental), single‑track, or single‑track with a reference mark (missing pole).
Mounting integration: The ring can be bonded directly to a metal hub, or we can supply it with a precision‑machined stainless steel carrier that includes mounting holes or a clamping hub.
Special material: we can use neodymium‑based rubber compounds with enhanced thermal stability.
Quality Assurance

The production process and pre-shipment inspection of precision magnetic rings are indispensable steps. Our magnetic rings are utilized in applications requiring high-accuracy position and angle measurement, where product dimensions and magnetic parameters directly impact our customers’ performance and output precision.
Our quality control include, but are not limited to, the following:
✅ Dimensional sampling inspection
✅ 100% magnetic parameter test
Why Choose OTV Sensing for Your Humanoid Robot Encoder Rings?

Deep domain expertise – Our engineers understand the physics behind Hall, AMR and TMR sensing, and how pole width, magnetization and runout affect real‑world performance.
Rapid prototyping – We deliver functional magnetic ring samples in 2‑4 weeks, allowing you to validate mechanical and electrical integration early in your design cycle.
Scalable production – From engineering samples to thousands of units, our supply chain ensures consistent quality and short lead times.
Competitive cost models – By optimizing designs exactly for your application and your volume, we could control well the cost.
Whether your project requires a standard off‑the‑shelf ring or a fully custom design, we are ready to support you from concept through production.
Thanks to contact with you and let’s discuss your specific requirements together.
OTV Sensing – Precision Magnetic Components for Advanced Motion Control.
FAQ
1.What output resolution can be achieved with the IC-MU200?
Depending on the number of master pole pairs (16, 32, or 64) of the matched magnetic ring, the IC-MU200 can provide output signals with 18, 19, or 20 bits of resolution.
2.Are the standard magnetic rings only suitable for angle measurement?
The IC-MU200 chip can be used for both absolute angle measurement and absolute linear displacement measurement. Linear magnetic scale need to be used for linear absolute position measurement.
3.What is the standard MOQ for your magnetic rings?
We are flexible to discuss volume-based adjustments for prototype or trial orders.
4.Can you produce custom desgin samples before full production? Is there a charge?
Yes, we can provide custom designsamples for validation. Samples are typically charged at a nominal fee to cover material and setup costs. Lead time for sample building is generally 4 weeks after design confirmation.
5.What is the typical lead time for standard magnetic ring orders?
For standard products with no stock, the lead time is 2 weeks after order confirmation and receipt of deposit.
6.Can I request custom magnetic ring specifications?
Yes,we fully support customization for parameters such as inner/outer diameter, mounting hole positions, thickness, and magnetic properties to meet specific application needs.
7.Can OTV Sensing provide alternative encoder solutions beyond magnetic encoder rings for applications that require even higher precision?
OTV Sensing also offers inductive encoder solutions.
Inductive encoders operate on electromagnetic coupling principles rather than magnetic field detection. They achieve significantly higher accuracy and resolution than magnetic encoders (often sub‑arcsecond levels) while maintaining insensitivity to dust, oil, and moisture. Additionally, inductive encoders are inherently immune to external magnetic fields and exhibit near‑zero temperature drift, making them ideal for high‑stability, high‑precision environments.