What Is an Off-Axis Magnetic Encoder?
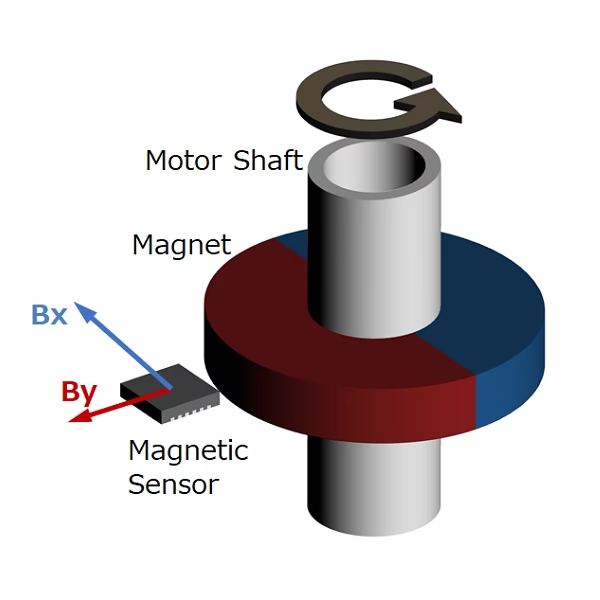
An off-axis magnetic encoder is a rotary position sensor where the sensing element (Hall or MR chip) is positioned beside the rotating shaft rather than at its end. A diametrically magnetized ring or multi-pole magnet ring is mounted on the shaft, and the sensor reads the rotating magnetic field from the side — hence “off-axis.”
A hollow-shaft magnetic encoder takes this a step further: the magnet ring has a large center bore, allowing cables, shafts, or fluid lines to pass through the encoder. This enables true zero-backlash, bearingless integration into robot joints, servo motors, and medical equipment.
On-Axis
Sensor sits at the end of the shaft. Requires the shaft end to be accessible. Occupies axial space.
Off-Axis (Hollow-Shaft)
Sensor reads the magnet ring from the side. Shaft passes through the ring. Saves axial space.
How Magnetic Encoders Work
Magnet Ring Creates a Rotating Field
A multi-pole or diametrically magnetized ring is mounted on the rotating shaft. As the shaft turns, the magnetic field pattern rotates in sync. Key parameters: pole pair count, magnetic flux density, pole width uniformity.
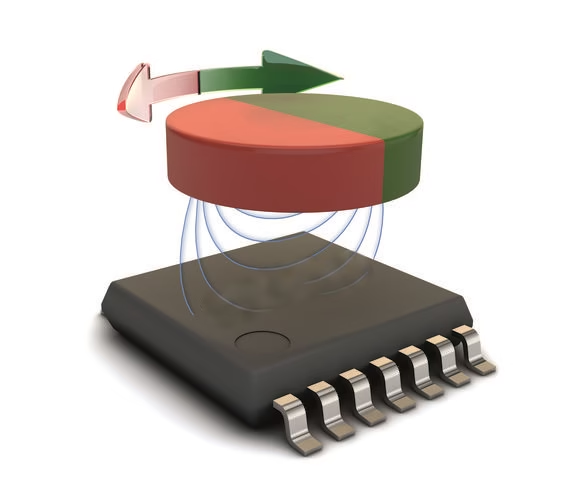
Sensor Chip Detects Field Orientation
A magnetic encoder IC (Hall-effect or MR-based) placed adjacent to the ring measures the in-plane magnetic field components. The IC computes the instantaneous field angle using internal arctangent calculation.
Digital Output to Controller
The IC outputs absolute or incremental angle data via standard protocols — SSi, BiSS-C, SPI, ABZ, or UART — directly to the motor drive, robot controller, or PLC.
The advantages of off-axis magnetic sensing over optical encoders are decisive for industrial applications: no glass disc to crack, no LED to dim, no optical path to contaminate. The non-contact magnetic principle is inherently immune to dust, oil, condensation, and vibration.
Mainstream Magnetic Encoder Chips
The off-axis magnetic encoder ecosystem is built around dedicated encoder ICs. Each chip family has specific requirements for the magnet ring — pole count, field strength, geometry — that directly affect achievable resolution and accuracy.
| Manufacturer | Key IC Series | Type | Resolution | Interface | OTV Ring Compatible |
|---|---|---|---|---|---|
| iC-Haus | iC-MU200, iC-MU150, iC-PVL | Hall Array | 18-22 bit | BiSS-C, SSi, SPI, ABZ | ✓ Yes |
| RLS (Renishaw) | Orbis, AksIM, LinACE | Hall Array | 14-20 bit | BiSS-C, SSi, SPI | ✓ Yes |
| AMS (Osram) | AS504x, AS5147, AS5600 | Hall Array | 12-14 bit | SPI, I2C, ABZ, PWM | ✓ Yes |
Additional encoder ICs from Melexis, Infineon, AKM, and others are also supported. View the full encoder IC compatibility guide →
Each IC has a defined magnetic input specification: the field strength range at the sensor location, typically 20–80 mT. The magnet ring must deliver the correct field amplitude at the air gap distance between ring surface and sensor. OTV designs magnet rings to match each chip’s optimal operating window. See: Magnetic Target for iC-Haus IC-MU200.
OTV Standard Off-Axis Magnetic Encoder — OME Series
The OME Series is OTV’s standard off-axis magnetic encoder product line. Each model features a hollow-shaft, bearingless design with a separated stator-rotor structure, with major encoder ICs listed above.

OTV OME Series — Off-Axis Hollow-Shaft Magnetic Encoder
| 1. Basic Performance | |||||||
|---|---|---|---|---|---|---|---|
| Parameter | OME06 | OME10 | OME20 | OME25 | OME35 | OME45 | OME65 |
| Resolution | 17 bit | 17-18 bit | 17-19 bit | 17-19 bit | 17-20 bit | 17-20 bit | 17-20 bit |
| Max Static Error | ±0.1° | ±0.1° | ±0.1° | ±0.1° | ±0.1° | ±0.1° | ±0.1° |
| Repeatability | ±1 LSB | ±1 LSB | ±1 LSB | ±1 LSB | ±1 LSB | ±1 LSB | ±1 LSB |
| Max Speed | 6,000 rpm | 6,000 rpm | 6,000 rpm | 6,000 rpm | 5,000 rpm | 5,000 rpm | 5,000 rpm |
| Range | Single Turn Absolute | ||||||
| Direction | CW Incrementing (Configurable) | ||||||
| 2. Mechanical Dimensions & Mounting | |||||||
|---|---|---|---|---|---|---|---|
| Parameter | OME06 | OME10 | OME20 | OME25 | OME35 | OME45 | OME65 |
| OD/ID/T (mm) | 28.5/6/7.6 | 38/10/8 | 54/20/8 | 59/25/8 | 67/35/8.6 | 75/45/8.6 | 96/65/8.6 |
| Weight (approx.) | 8 g | 11 g | 15 g | 18 g | 22 g | 25 g | 30 g |
| Eccentricity | ±0.1 mm | ||||||
| Axial Distance | 1.3±0.1 | 1.3±0.1 | 1.3±0.1 mm | ||||
| Rotor-Stator Gap | 1.3 mm | ||||||
| Inertia (kg·mm²) | 0.29 | 0.69 | 2.58 | 5.45 | 10.63 | 18.88 | 46.48 |
| 3. Environmental Conditions | |
|---|---|
| Operating Temperature | -30°C to +85°C |
| EMC Standards | IEC 61000-6-2, IEC 61000-6-4 |
| Relative Humidity | 0-99% (non-condensing) |
| Shock Resistance | 100 g / 11 ms |
| Vibration | 0.04 g²/Hz (10 Hz – 2,000 Hz) |
| 4. Electrical & Interface | |
|---|---|
| Supply Voltage | 5 V ±5% |
| Current | ≤100 mA |
| Electrical Connector | 8-Pin Connector |
| Output Protocols | SSi, BiSS-C, ABZ |
Download Product Datasheets
PDF datasheet with full mechanical drawings, electrical specs, and ordering codes
All models: Single-turn absolute · Non-contact · Separated stator-rotor · FR-4 material · Additional sizes and custom configurations available on request.
Where Off-Axis Magnetic Encoders Excel
Medical Devices
CT gantry rotation, surgical robots, prosthetic joints. Sterile-compatible, non-contact.
AGV & Mobile Robots
Steering angle feedback immune to drive motor magnetic interference.
Aerospace Actuators
Flight control surfaces, landing gear. Wide temperature, vibration resistant.
Oil & Gas Equipment
Downhole tool positioning. High-temperature magnets up to 250°C.
Why OTV for Off-Axis Magnetic Encoder Solutions
① Magnet Ring & Encoder from ONE Supplier
We manufacture both the precision magnet ring and the encoder module. No finger-pointing between magnet supplier and sensor integrator — one partner, one guarantee.
② In-House Precision Magnetization
Custom-built magnetization fixtures, closed-loop current control, 100% pole-width inspection. Custom rings shipped in 2 weeks.
③ Full Encoder IC Compatibility
Magnet rings characterized for iC-Haus, RLS, AMS encoder ICs. Field strength, air gap, and pole geometry matched to each chip’s optimal operating point.
④ Direct Replacement for RLS & Competitors
Form-fit-function compatible magnet rings for RLS magnetic encoders. Customization possible at no NRE for qualified projects.
Need an Off-Axis Magnetic Encoder Solution?
Tell us your encoder IC, pole count, ID/OD, and accuracy target. We’ll recommend the optimal OME series encoder or magnet ring — or design one from scratch.
Standard samples in 1 week. Custom rings in 2–4 weeks. Engineering support included.
Contact OTV Engineering Team →
thomas@otvsensing.com
Magnetic Target for iC-Haus IC-MU200 ·
Encoder ICs Guide ·
Nonius Rotary Scale ·
Hard Ferrite Magnet Rings ·
Custom Magnetic Rings ·
Encoder Rings for Robots ·
Off-Axis Encoders in Robot Joints ·
Inductive Encoder (INE Series)
OTV Precision Sensing | www.otvsensing.com | Suzhou, China