Magnetic Scale: Applications and Customized Solutions
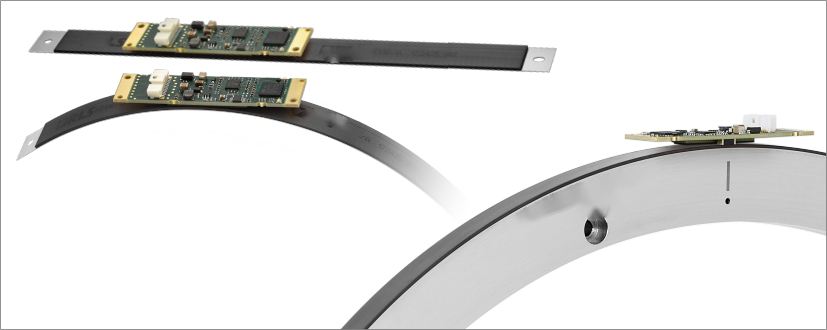
Magnetic encoder scale systems are a cost-effective position detection solution based on magnetic principles. A complete magnetic encoder scale system consists of the magnetic scale and a read head, with the core of the read head being various advanced magnetic sensing chips.
1. System Composition and Working Principle
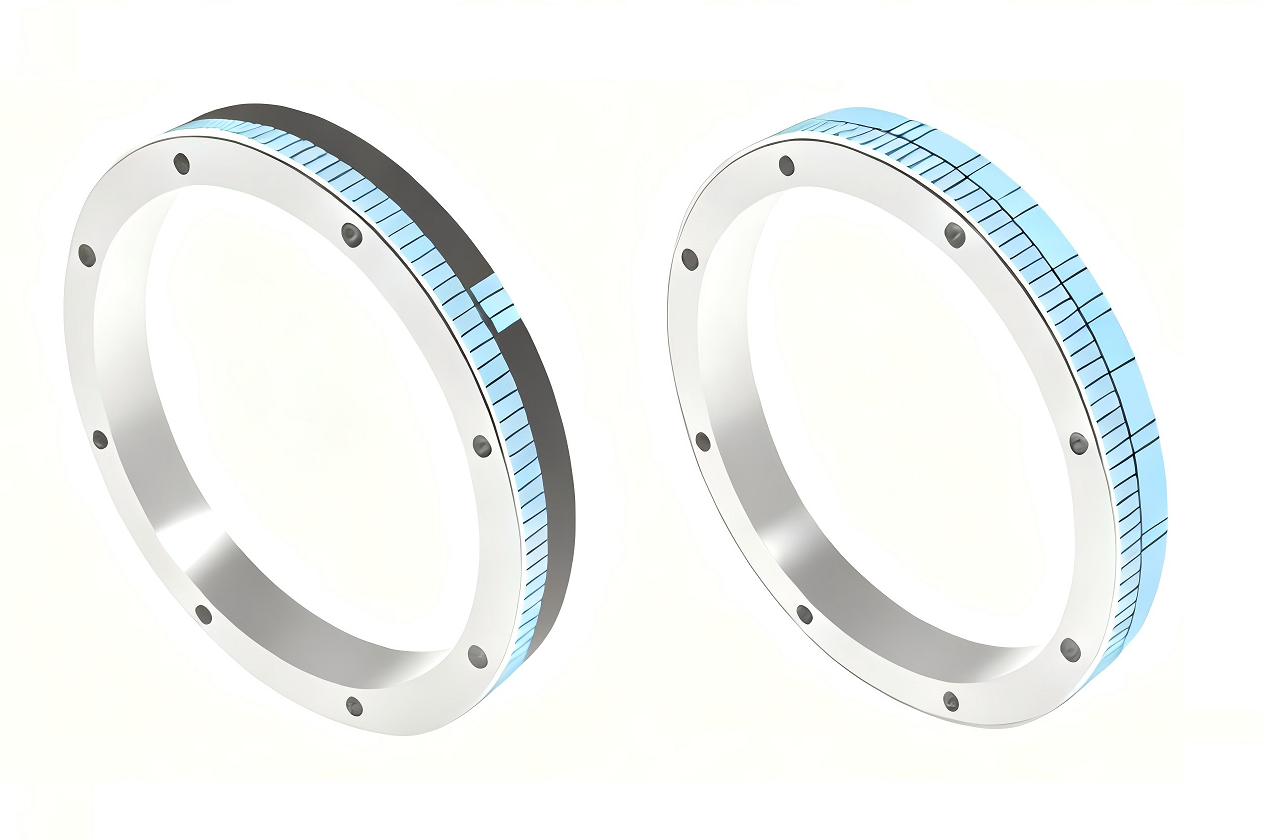
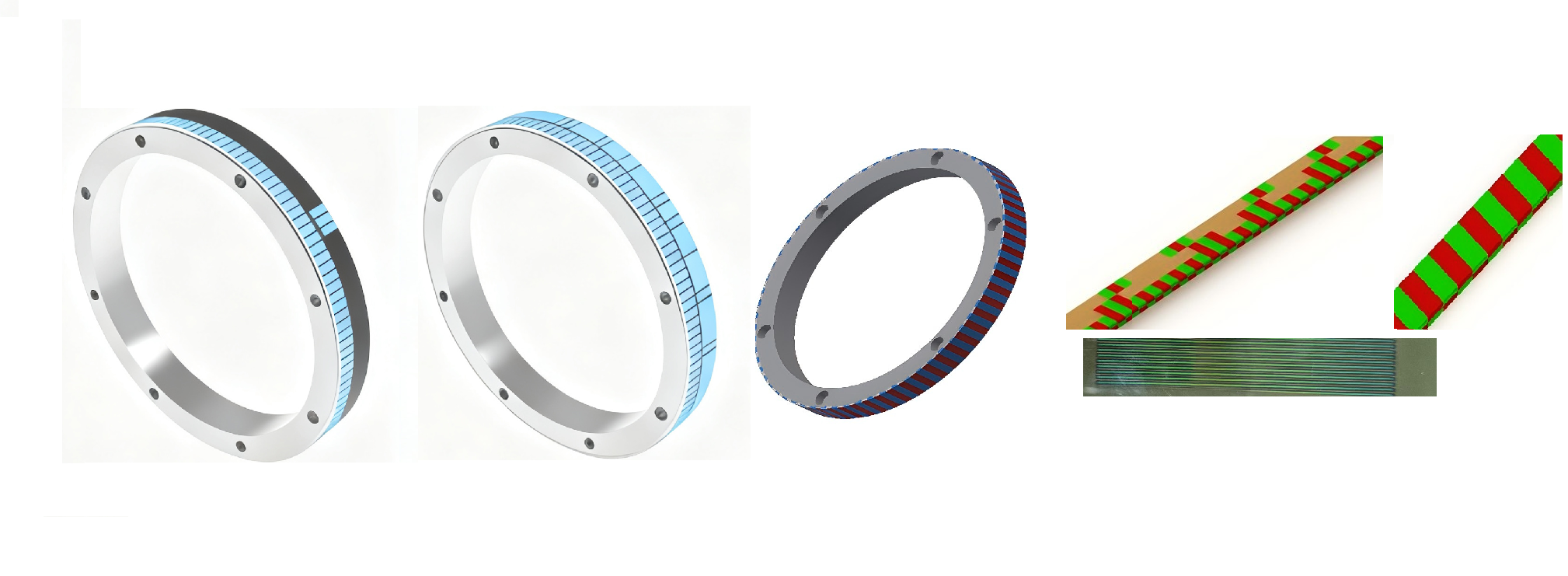
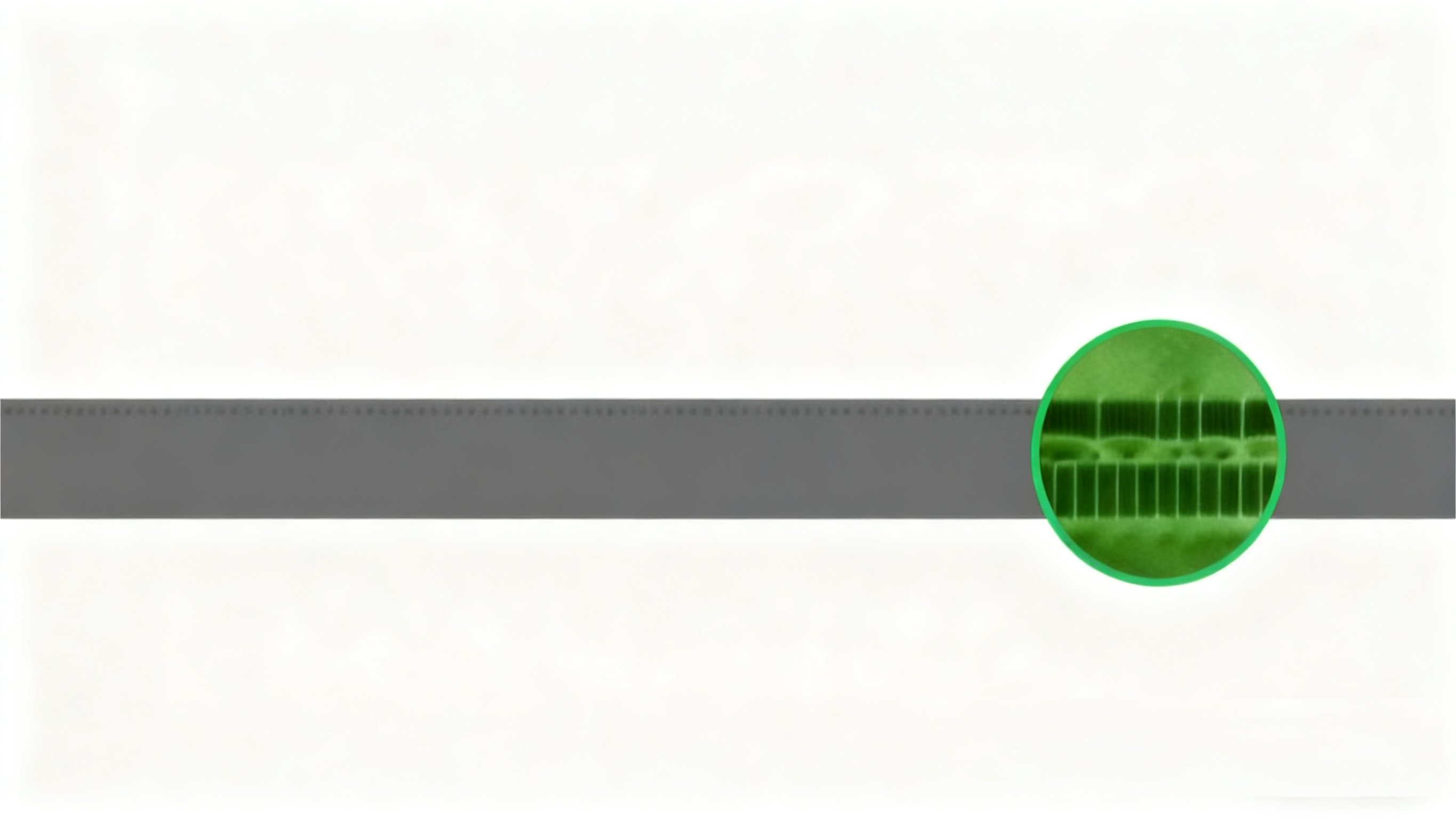
1.1 Magnetic Scale
The magnetic scale serves as the system’s reference ruler. It features evenly spaced, alternating N-S magnetic grids recorded on a base strip. Key performance parameters include:
-
Accuracy: Maximum error over the full stroke, e.g., ±5 μm/m.
-
Resolution: The smallest detectable displacement, which can reach 0.1 μm through signal interpolation.
-
Pitch: The distance between adjacent magnetic poles (e.g., 1 mm, 2 mm), forming the basis of system resolution.
-
Repeatability: Consistency in returning to the same position.
-
Protection Rating: resistant to oil and coolant.
-
Thermal Expansion Coefficient: High-end magnetic scales use low-expansion materials to match machine tool properties and minimize thermal drift.
1.2 Magnetic Scale Product Specifications: Linear & Rotary Types
We provides comprehensive magnetic scale solutions with both linear and rotary types, offering precision positioning for various industrial applications. The table below details the key specifications and performance parameters of our standard product series:
| Parameter | Linear Magnetic Scales | Rotary Magnetic Scales |
|---|---|---|
| Measurement Range | 100 mm – 30 m | 360° (single turn), multi-turn options available |
| Accuracy | ±5 μm/m | ±20 arcseconds |
| Resolution | 1 μm (standard), 0.1 μm (high-precision) | 0.001° (standard), 0.0001° (high-precision) |
| Pitch/Grating Period | 1 mm, 2 mm (customizable) | 512 poles, 1060 poles (customizable) |
2. Detailed Analysis of Magnetic Sensing Chip Technologies
The performance of a magnetic encoder scale largely depends on the sensing technology used in the read head. Different types of sensing chips determine the system’s accuracy, resolution, and anti-interference capability. The table below compares the characteristics of mainstream sensing technologies:
| Sensing Technology | Working Principle | Advantages | Disadvantages | Application Scenarios |
|---|---|---|---|---|
| Hall Effect | Utilizes the Hall effect to sense the magnetic field component perpendicular to the chip surface. | 1. Low cost 2. Mature technology 3. Simple interface 4. Long lifespan |
1. Low sensitivity 2. Limited resolution 3. Relatively high noise |
Medium-to-low accuracy, cost-sensitive applications, such as general motor speed control and rough position detection. |
| Anisotropic Magnetoresistance (AMR) | Uses the change in resistivity of ferromagnetic materials under an external magnetic field. | Much higher sensitivity than Hall effect, capable of detecting weak magnetic field changes. | 1. Low saturation magnetic field 2. Narrow measurement range 3. Sensitive to strong magnetic fields |
Early high-precision magnetic encoders, gradually being replaced by TMR and other technologies. |
| Tunnel Magnetoresistance (TMR) | Relies on the magnetic tunnel junction effect, where resistance changes dramatically with the relative magnetization direction of two ferromagnetic layers. | 1. Highest sensitivity among current technologies 2. Extremely high signal-to-noise ratio 3. Wide frequency response 4. Low power consumption |
1. Relatively high cost 2. Relatively new technology |
High-end magnetic encoder scales, servo motors, robotic joints, and other scenarios requiring extremely high resolution, speed, and accuracy. The preferred technology for high-performance magnetic encoder scales. |
| Giant Magnetoresistance (GMR) | Based on electron spin-dependent scattering between non-magnetic layers in different ferromagnetic layers. | 1. High sensitivity 2. Small size |
Sensitivity generally between AMR and TMR | Hard disk drives, automotive angle sensors, etc.; less widely used in magnetic encoder scales compared to TMR. |
| Inductive Sensing
|
Detects changes in magnetic permeability of the scale through electromagnetic induction in sensing coils. | 1. Non-contact 2. Low requirement for magnet strength 3. Extremely strong resistance to external magnetic interference |
1. Requires high-frequency excitation circuits 2. Relatively complex system 3. Read head may be larger |
Harsh industrial environments with strong external magnetic interference, and long-life applications concerned with magnet degradation. |
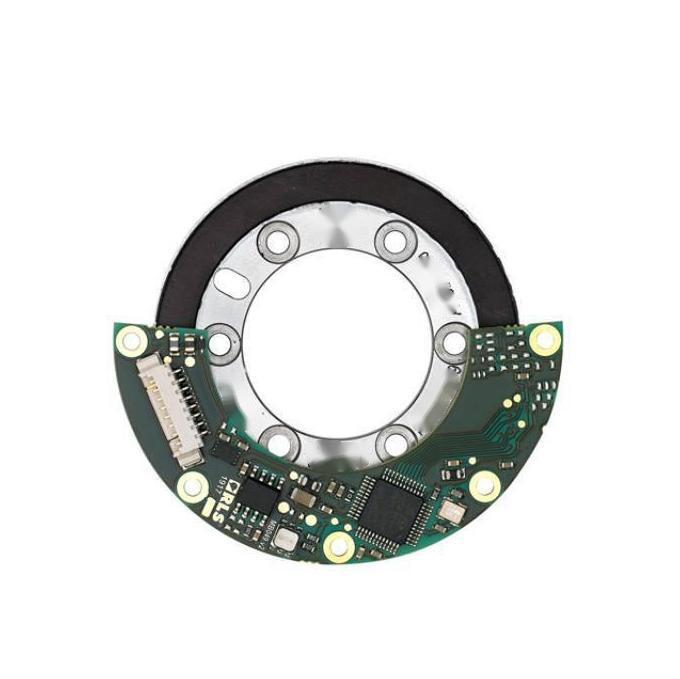
3. Typical sensing Chips
Regardless of the sensing technology used, the raw output signals require specialized chips for processing:
3.1 Incremental Signal Processing Chips
-
Representative Models: iC-Haus iC-MU (for Hall/TMR), iC-PZ; AMS AS5304/AS5306 (Hall).
-
Functions: Integrated multi-channel sensor interfaces, differential amplifiers, high-interpolation dividers (up to 4096x), and line drivers for A/B/Z quadrature square wave outputs.
3.2 Absolute Encoder Chips
-
Representative Models: AMS AS5047P/AS5048A (Hall); iC-Haus iC-PQ (configurable for TMR, etc.); Allegro A1335 (Hall).
-
Functions: Directly process raw signals to calculate absolute angles, output position values via SPI, SSI, ABI, or other digital interfaces, while also providing incremental signals.
4. Types and Applications of Magnetic Encoder Scales
4.1 Types
-
Linear Scales: For linear displacement measurement in CNC machine tools, laser cutting, linear motors, etc.
-
Rotary Scales: For angular displacement measurement in servo motors, robotic joints, etc.
-
Incremental Type: Cost-effective, requires homing.
-
Absolute Type: Provides immediate position upon power-up, safe and efficient.
4.2 Application Areas
-
High-End Manufacturing: CNC machine tools, machining centers.
-
Automation and Robotics: Servo motors, robotic joints, linear modules.
-
Precision Measurement: Coordinate measuring machines (CMMs), semiconductor equipment.
5. OTV Customized Solutions
OTV understands that every application has unique requirements. That’s why we focus on delivering fully customized magnetic scale solutions tailored to your specific needs. Whether you require special dimensions, specific accuracy grades, or compatibility with particular operating environments, our engineering team is ready to collaborate with you.
Our customization capabilities include:
-
Customizing scale dimensions based on customer layout and assembly requirements
-
Special protection treatments for harsh environments (high temperature, vacuum, corrosive conditions)
-
Magnetization customization according to customer needs: magnetic pole pairs, pole spacing, accuracy, magnetic field strength, origin position and shape, etc.

Ready to optimize your positioning system?
Contact OTV for a technical discussion. Let us work with you to develop together the most suitable magnetic scale solution, balancing performance, cost, and reliability.
Reviews
There are no reviews yet.