iC-Haus Off-Axis and Linear Magnetic Encoder Solutions
In the fields of industrial automation, robotics, and precision measurement, achieving high-accuracy position feedback for hollow-shaft structures or long-distance linear displacements is a constant engineering challenge.
IC-HAUS offers a range of high-performance magnetic encoder chips, particularly renowned for their exceptional capabilities in Off-Axis (Hollow Shaft) and Linear Position Measurement applications.
The Nonius Principle and Off-Axis Design
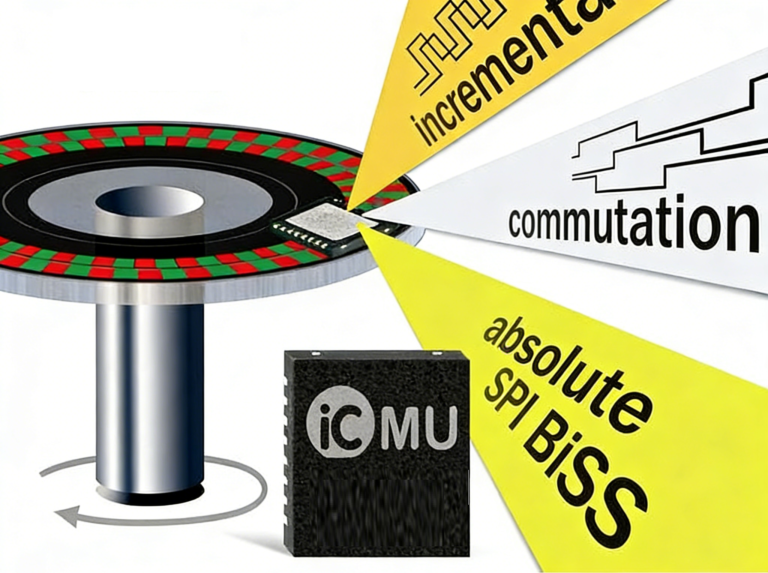
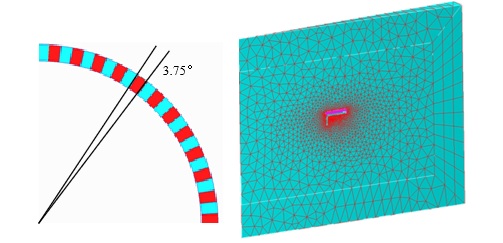
C-HAUS’s off-axis magnetic encoder chips, such as the popular iC-MU series and the latest iC-MUE, utilize an advanced decimal Vernier (Nonius) engine technology. This technology calculates absolute position by scanning two code tracks with different periods, enabling the system to obtain the current absolute position instantly upon power-up without the need for a battery.
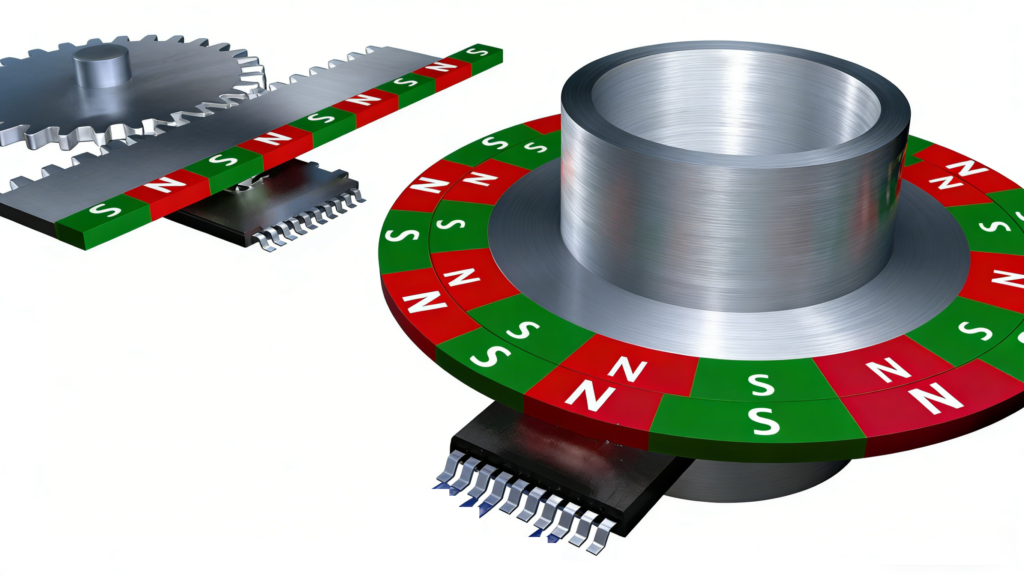
The key advantage lies in the Off-Axis design. Unlike traditional coaxial solutions where the chip must be placed directly above the rotating shaft’s center, the off-axis design allows the chip to sense a ring magnet located on the side of the shaft. This makes it inherently suitable for Hollow Shaft encoders, offering significant mechanical flexibility for motor design, simplifying installation, and saving valuable space .
Off-Axis Rotary Applications: Robotics and Motor Feedback

For robotic joints and servo motors, compactness and high dynamic response are critical. IC-HAUS off-axis chips perfectly meet these requirements:
High Resolution and Accuracy: Take the iC-MUE as an example. When working with a 64 pole pairs magnetic ring, it achieves an angular resolution of 21 bits. In practical applications, through built-in eccentricity compensation and Look-Up Table (LUT) correction, it can deliver an angular accuracy better than ±0.04° .
Flexible Design Adaptability: The Vernier engine of the iC-MUE can flexibly adapt to scanning diameters ranging from 20mm to 85mm. This means engineers can design the magnetic ring freely based on the motor size, unrestricted by a fixed sensing point location on the chip .
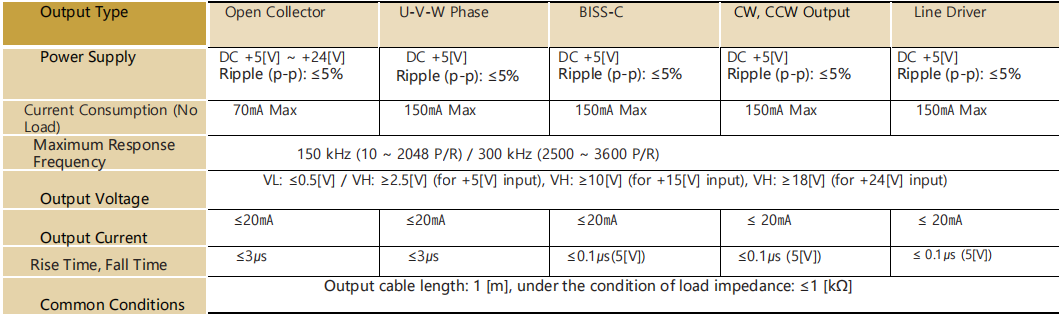
Rich Output Signals: The chips offer multiple interfaces simultaneously, including BiSS, SSI, SPI for high-speed absolute position feedback, incremental ABZ signals for traditional control, and UVW commutation signals for brushless DC motors (supporting motors with 1 to 32 pole pairs).
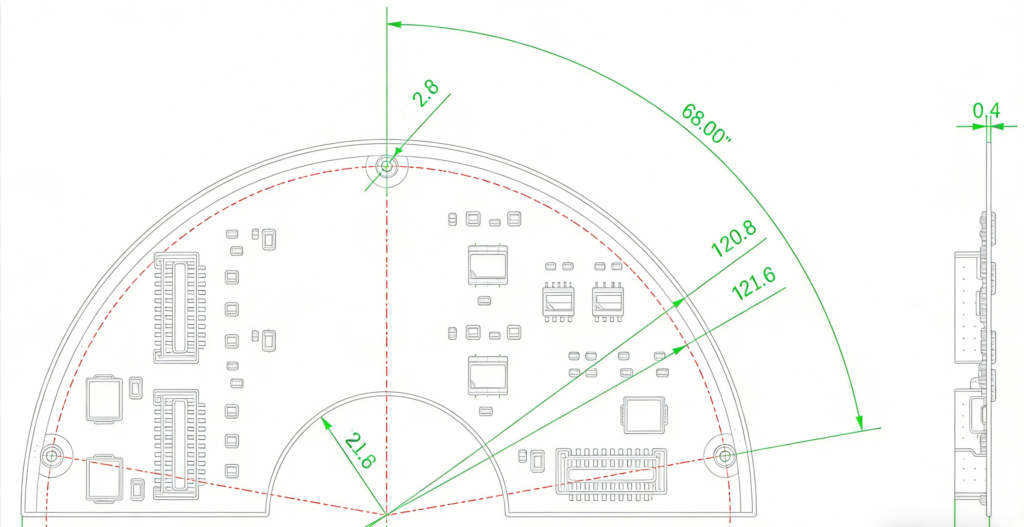
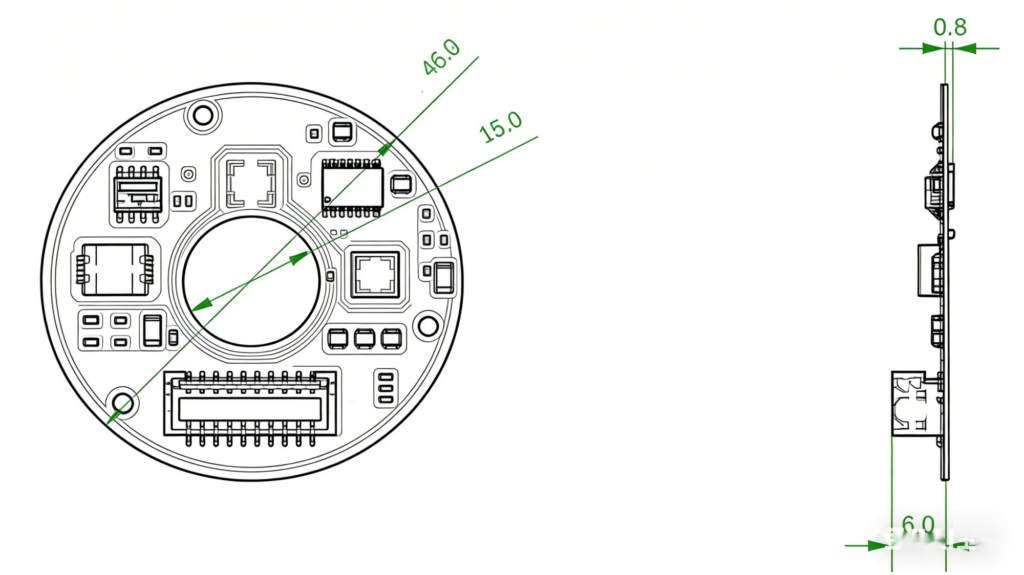
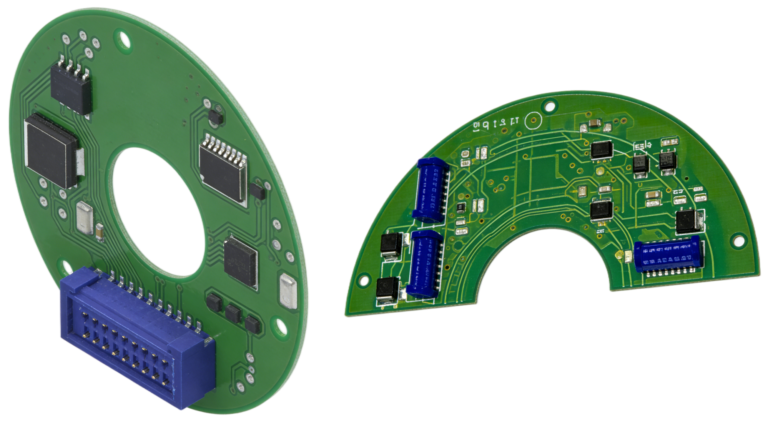
This is one of our magnetic encoder products based on the IC-Haus MU150 chip. The product parameters are provided for your reference. For more product series, please feel free to get in touch with us.
Linear Applications: Linear Displacement Measurement
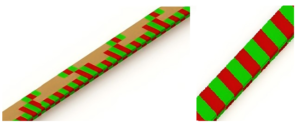
In linear position sensing, the chip moves along a magnetic scale with alternating polarities to form a closed-loop measurement system.
- iC-MU: The iC-MU series could work for both rotary and linear measurement, can realize an absolute linear position sensor when working with a linear magnetic scale.
- iC-MHL200: Features a 12-bit interpolation resolution and supports linear speeds up to 8 m/s with a resolution better than 1 µm.
- iC-PVS: Also supports linear motion detection, achieving an extremely high tracking speed of 75 m/s when used with 1.5 mm poles.
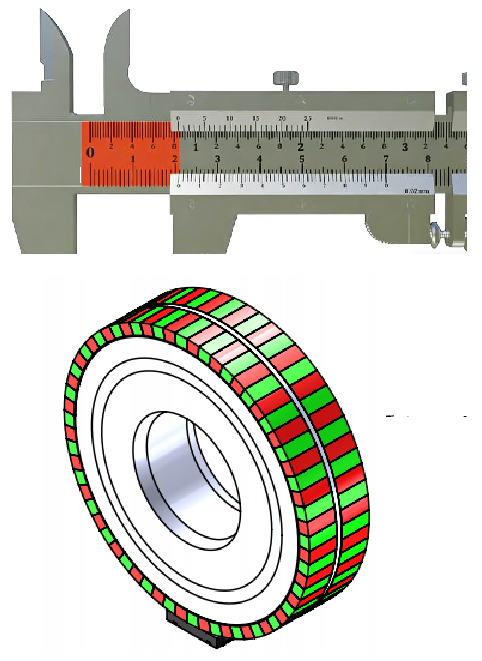
Requirements for Matching Magnetic Rings

The accuracy performance of a magnetic encoder system—including its accuracy and repeatability—is also effected by the precison of the magnetic target and the mechanical installation.

- iC-MHL200 / iC-MZ: These chips strictly require a pole width of 2 mm (resulting in a 4 mm magnetic period P).
- iC-MU Series: Specifically designed for targets with two incremental tracks; the master track must have a pole width of approximately 1.28 mm (e.g., the standard Ø 30 mm MU2S disk).
- iC-PVL: Highly flexible, supporting pole widths from 1.0 mm to 5.0 mm. A 1.5 mm width is ideal for its recommended differential scanning mode.
- iC-PVS: Compatible with magnetic scales featuring pole widths between 1.0 mm and 2.5 mm
- General Requirements: Most chips (such as iC-PVL and iC-MHL200) require a field strength at the chip surface between 20 kA/m and 100 kA/m (roughly 12.5 mT to 125 mT).
- Monitoring Features: Chips like iC-TW11 and iC-PVL include Automatic Gain Control (AGC) and monitoring bits (e.g.,
MAG_ERR) to verify the air gap and detect “loss-of-magnet” conditions in real-time.
- Air Gap: The typical working distance is roughly 0.4 mm to 0.5 mm, though this varies based on the strength of the magnetic target.
- Eccentricity Compensation: Advanced processors like the iC-TW29 feature auto-calibrated eccentricity compensation, which corrects long-wave position errors caused by off-center mounting of the magnetic ring or disk
Magnet Encoder Test
Here is the demonstration about how to perform performance testing on the iC-MU series off-axis magnetic encoder chip with the magnet target.
The encoder board is connected to the PC via the iC-Haus USB PC-Adapter. This adapter serves as a bridge between BiSS/SSI or SPI interfaces and the computer.
The test is done by Windows-based GUI evaluation software provided by iC-Haus.
We specialize in delivering high-performance magnetic encoder solutions including the encoder board built with chips like the iC-MU series and the magnet target.
Our team is ready to work with you for selecting the right encoder chip and matching magnetic components for your specific application:servo motors, robotic joints, or linear motion systems,
If you have questions about off-axis encoder design, linear position feedback, or technical requirements for magnetic rings, please feel free to contact us. Let’s work together to for your specific requirement.
FAQ
1.What output resolution can be achieved with the IC-MU200?
Depending on the number of master pole pairs (16, 32, or 64) of the matched magnetic ring, the IC-MU200 can provide output signals with 18, 19, or 20 bits of resolution.
2.Are the standard magnetic chips only suitable for angle measurement?
The IC-MU200 chip can be used for both absolute angle measurement and absolute linear displacement measurement. Linear magnetic scale need to be used for linear absolute position measurement.
3.What is the standard MOQ for your magnetic encoders?
We are flexible to discuss volume-based adjustments for prototype or trial orders.
4.Can you produce custom desgin samples before full production? Is there a charge?
Yes, we can provide custom designsamples for validation. Samples are typically charged at a nominal fee to cover material and setup costs. Lead time for sample building is generally 4 weeks after design confirmation.
5.What is the typical lead time for standard magnetic encoder orders?
For standard products with no stock, the lead time is 2 weeks after order confirmation and receipt of deposit.
6.Can I request custom magnetic target specifications?
Yes,we fully support customization for parameters such as inner/outer diameter, mounting hole positions, thickness, and magnetic properties to meet specific application needs.